数据上报接口说明
设备状态上报链路图
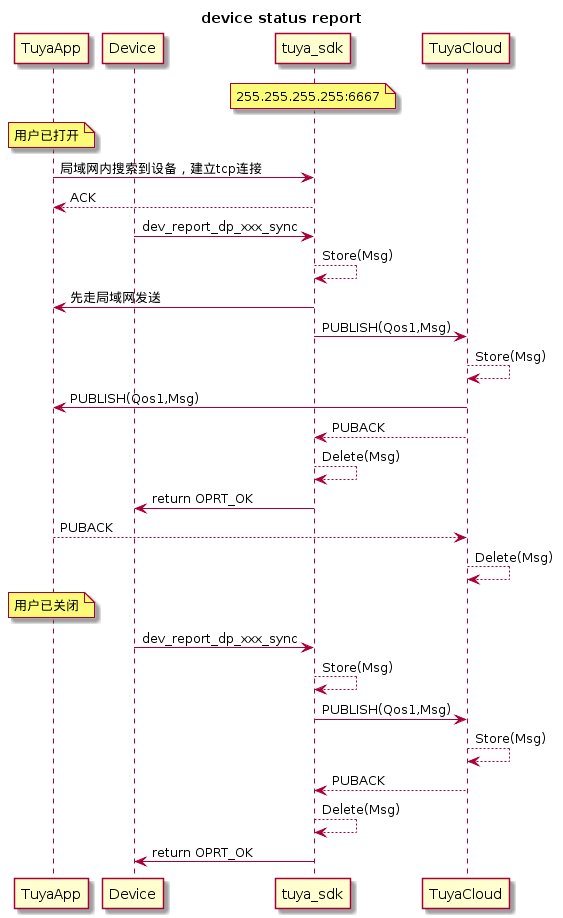
说明:
- 对于同步上报接口,如果在接口超时时间到时,tuya_sdk还未收到服务器的PUBACK,接口返回失败;根据enable_auto_retrans参数不同,tuya_sdk动作如下:
- enable_auto_retrans = TRUE, tuya_sdk保留未发送成功的消息(和服务器保持连接的情况下),并自动尝试重新发送;
- enable_auto_retrans = FALSE,tuya_sdk直接Delete(Msg)
接口说明
dev_report_dp_json_async
- 为异步上报接口, PUBLISH(Qos1,Msg);
- tuya_sdk不会等待服务器的PUBACK,立即返回给设备
/***********************************************************
* Function: dev_report_dp_json_async
* Desc: report dp info a-synced.
* Input: devid: if sub-device, then devid = sub-device_id
* if gateway/soc/mcu, then devid = NULL
* Input: dp_data: dp array header
* Input: cnt : dp array count
* Return: OPRT_OK: success Other: fail
***********************************************************/
OPERATE_RET dev_report_dp_json_async(IN CONST CHAR_T *dev_id,IN CONST TY_OBJ_DP_S *dp_data,IN CONST UINT_T cnt);
dev_report_dp_stat_sync
- 同步上报接口,PUBLISH(Qos1,Msg);
/***********************************************************
* Function: dev_report_dp_stat_sync
* Desc: report dp status info synced.
* if time_stamp==0, time_stamp = time of msg arrival of the server
* Input: devid: if sub-device, then devid = sub-device_id
* if gateway/soc/mcu, then devid = NULL
* Input: dp_data: dp status array header
* Input: cnt : dp status array count
* Input: timeout: function blocks until timeout seconds
* Return: OPRT_OK: success Other: fail
***********************************************************/
#define dev_report_dp_stat_sync(dev_id, dp_data, cnt, timeout) \
dev_report_dp_stat_sync_extend(dev_id, dp_data, cnt, timeout, TRUE)
OPERATE_RET dev_report_dp_stat_sync_extend(IN CONST CHAR_T *dev_id,IN CONST TY_OBJ_DP_S *dp_data,\
IN CONST UINT_T cnt,IN CONST UINT_T timeout, IN CONST BOOL_T enable_auto_retrans);
dev_report_dp_raw_sync
- 为同步上报接口, PUBLISH(Qos1,Msg);
/***********************************************************
* Function: dev_report_dp_raw_sync
* Desc: report dp raw info synced.
* Input: devid: if sub-device, then devid = sub-device_id
* if gateway/soc/mcu, then devid = NULL
* Input: dpid: raw dp id
* Input: data: raw data
* Input: len : len of raw data
* Input: timeout: function blocks until timeout seconds
* Return: OPRT_OK: success Other: fail
***********************************************************/
#define dev_report_dp_raw_sync(dev_id, dpid, data, len, timeout) \
dev_report_dp_raw_sync_extend(dev_id, dpid, data, len, timeout, TRUE)
OPERATE_RET dev_report_dp_raw_sync_extend(IN CONST CHAR_T *dev_id,IN CONST BYTE_T dpid,\
IN CONST BYTE_T *data,IN CONST UINT_T len,\
IN CONST UINT_T timeout, IN CONST BOOL_T enable_auto_retrans);
实例代码
RAW型数据上报
/*****************************************************************
* @Function: tuya_iot_sdk_upload_raw
* @Description: 上报RAW型数据示例说明
* @Param: Do not edit
* @Return: void
*****************************************************************/
OPERATE_RET tuya_iot_sdk_upload_raw(void)
{
OPERATE_RET op_ret;
unsigned char dpid = 19;
unsigned char data[] = {"iot.tuya.com"};
op_ret = dev_report_dp_raw_sync(NULL,dpid,data,sizeof(data),5);
if (op_ret != OPRT_OK){
PR_ERR("dev_report_dp_raw_sync op_ret:%d",op_ret);
}
else{
PR_NOTICE("dev_report_dp_raw_sync success");
}
return op_ret;
}
数值型value数据上报
如下图所示,我们以扫地机产品为例来说明DP_ID = 16的清扫面积功能点上报方法
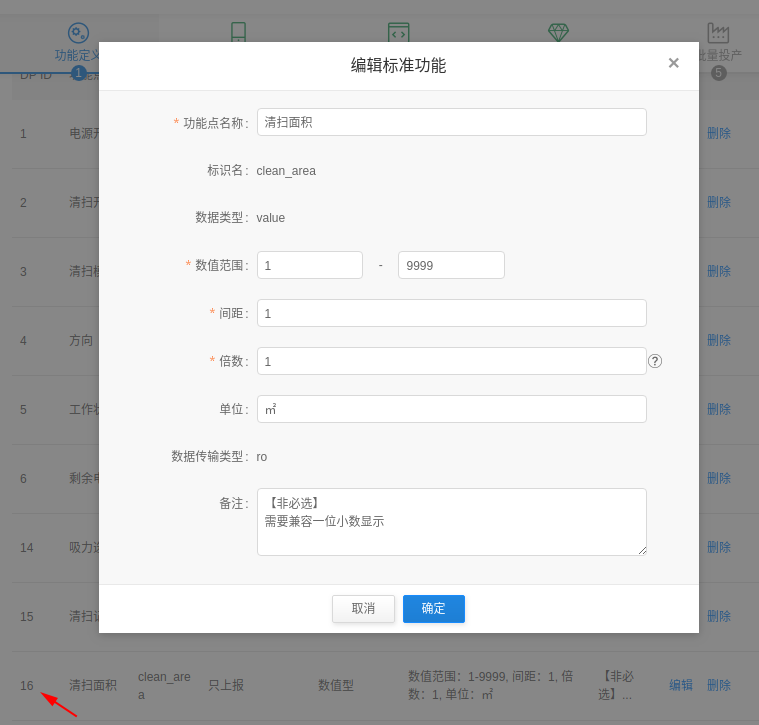
- 数值范围 1 ~ 9999,最大可定义范围(-2147483648~2147483647)
- 间距 1, 即上报合法的数据为 1 2 3 …… 9999
倍数 1, 也可以理解为数值精度,APP界面显示数值 = 设备上报数值 * 10^(-1)
如设备上报 121,手机界面显示12.1
代码参考
/*****************************************************************
* @Function: tuya_iot_sdk_upload_value
* @Description: 上报数值型数据示例说明
* @Param: signed int value
* @Return: OPERATE_RET
*****************************************************************/
OPERATE_RET tuya_iot_sdk_upload_value(signed int value)
{
OPERATE_RET op_ret;
TY_OBJ_DP_S value_dp;
value_dp.dpid = 16;
value_dp.time_stamp = 0; // dp happen time. if 0, mean now
value_dp.type = PROP_VALUE;
value_dp.value.dp_value = value;
op_ret = dev_report_dp_json_async(NULL,&value_dp,sizeof(value_dp)/sizeof(TY_OBJ_DP_S));
if (op_ret != OPRT_OK){
PR_ERR("dev_report_dp_json_async op_ret:%d",op_ret);
}
else{
PR_NOTICE("dev_report_dp_json_async success");
}
return op_ret;
}
故障型bitmap数据上报
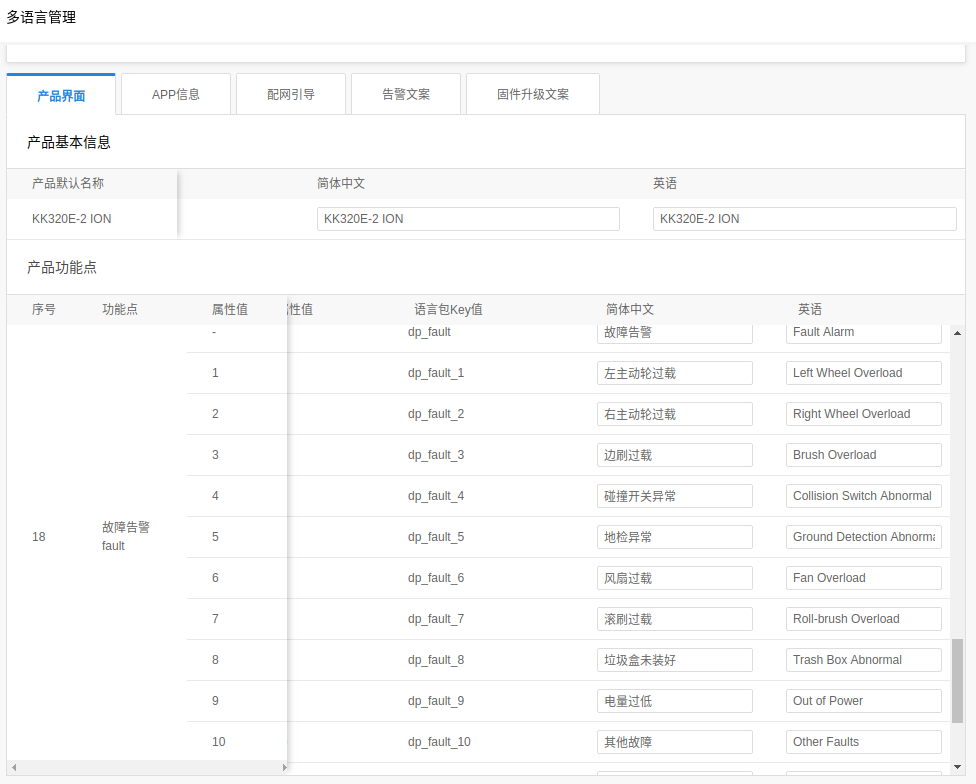
如下图所示,我们以扫地机产品为例来说明DP_ID = 18的故障告警功能点上报方法:

代码参考
#define Clean_Fault (0x00) // 清除故障显示
#define Left_Wheel_Overload (0x01) // 左主动轮过载
#define Right_Wheel_Overload (0x02) // 右主动轮过载
#define Brush_Overload (0x04) // 边刷过载
#define Collision_Switch_Abnormal (0x08) // 碰撞开关异常
#define Ground_Detection_Abnormal (0x10) // 地检异常
#define Fan_Overload (0x20) // 风扇过载
#define Roll_brush_Overload (0x40) // 滚刷过载
#define Trash_Box_Abnormal (0x80) // 垃圾盒未装好
#define Out_of_Power (0x0100) // 电量过低
#define Other_Faults (0x0200) // 其他故障
/*****************************************************************
* @Function: tuya_iot_sdk_upload_bitmap
* @Description: 上报故障型数据示例说明
* @Param: Do not edit
* @Return: void
*****************************************************************/
OPERATE_RET tuya_iot_sdk_upload_bitmap(void)
{
OPERATE_RET op_ret;
TY_OBJ_DP_S bitmap_dp;
bitmap_dp.dpid = 18;
bitmap_dp.time_stamp = 0; // dp happen time. if 0, mean now
bitmap_dp.type = PROP_BITMAP;
bitmap_dp.value.dp_bitmap = (Out_of_Power | Ground_Detection_Abnormal); // 上报电量过低 & 地检异常
op_ret = dev_report_dp_json_async(NULL,&bitmap_dp,sizeof(bitmap_dp)/sizeof(TY_OBJ_DP_S));
if (op_ret != OPRT_OK){
PR_ERR("dev_report_dp_json_async op_ret:%d",op_ret);
}
else{
PR_NOTICE("dev_report_dp_json_async success");
}
}
故障显示语言配置
具体操作请参考产品多语言管理:https://docs.tuya.com/cn/product/product-language.html
字符串型string数据上报
这里以上报一个json格式的数据为例
代码参考
/*****************************************************************
* @Function: tuya_iot_sdk_upload_str
* @Description: 上报字符串型数据示例说明,以上报一个cjson字符串为例
* @Param: Do not edit
* @Return: OPERATE_RET
*****************************************************************/
OPERATE_RET tuya_iot_sdk_upload_str(void)
{
cJSON * pJsonRoot = NULL;
pJsonRoot = cJSON_CreateObject();
if(NULL == pJsonRoot){
return OPRT_MALLOC_FAILED;
}
cJSON_AddStringToObject(pJsonRoot, "obj1", "Hello TuyaInc");
cJSON_AddNumberToObject(pJsonRoot, "number", 10010);
cJSON_AddBoolToObject(pJsonRoot, "bool", 1);
char * pJsonStr = cJSON_PrintUnformatted(pJsonRoot);
printf("pJsonRoot:%s\n",pJsonStr);
cJSON_Delete(pJsonRoot);
// 增加转义字符
char *pConJsonStr = NULL;
pConJsonStr = str_replace(pJsonStr,"\"","\\\"");
if(NULL == pConJsonStr){
return OPRT_MALLOC_FAILED;
}
printf("pConJsonStr:%s\n",pConJsonStr);
OPERATE_RET op_ret;
TY_OBJ_DP_S str_dp;
str_dp.dpid = 15;
str_dp.time_stamp = 0; // dp happen time. if 0, mean now
str_dp.type = PROP_STR;
str_dp.value.dp_str = pConJsonStr;
op_ret = dev_report_dp_json_async(NULL,&str_dp,sizeof(str_dp)/sizeof(TY_OBJ_DP_S));
if (op_ret != OPRT_OK){
PR_ERR("dev_report_dp_json_async op_ret:%d",op_ret);
}
else{
PR_NOTICE("dev_report_dp_json_async success");
}
free(pConJsonStr);
free(pJsonStr);
return op_ret;
}
/*****************************************************************
* @Function: str_replace
* @Description: Do not edit
* @Param: Do not edit
* @Return: value, 要记得free(value)
*****************************************************************/
char *str_replace(const char *src, const char *from, const char *to)
{
size_t size = strlen(src) + 1;
size_t fromlen = strlen(from);
size_t tolen = strlen(to);
char *value = malloc(size);
char *dst = value;
if ( value != NULL )
{
for ( ;; )
{
const char *match = strstr(src, from);
if ( match != NULL ){
size_t count = match - src;
char *temp;
size += tolen - fromlen;
temp = realloc(value, size);
if ( temp == NULL ){
free(value);
return NULL;
}
dst = temp + (dst - value);
value = temp;
memmove(dst, src, count);
src += count;
dst += count;
memmove(dst, to, tolen);
src += fromlen;
dst += tolen;
}
else /* No match found. */
{
strcpy(dst, src);
break;
}
}
}
return value;
}
数据组合上报
如下以组合上报扫地机器人设备的剩余电量、边刷寿命、滚刷寿命、滤网寿命数据;

代码参考
TY_OBJ_DP_S dp_msg[4];
// 剩余电量
dp_msg[0].dpid = 6;
dp_msg[0].type = PROP_VALUE;
dp_msg[0].value.dp_value = 100;
dp_msg[0].time_stamp = 0;
// 边刷寿命
dp_msg[1].dpid = 7;
dp_msg[1].type = PROP_VALUE;
dp_msg[1].value.dp_value = 99;
dp_msg[1].time_stamp = 0;
// 滚刷寿命
dp_msg[2].dpid = 8;
dp_msg[2].type = PROP_VALUE;
dp_msg[2].value.dp_value = 90;
dp_msg[2].time_stamp = 0;
// 滤网寿命
dp_msg[3].dpid = 9;
dp_msg[3].type = PROP_VALUE;
dp_msg[3].value.dp_value = 0;
dp_msg[3].time_stamp = 0;
op_ret = dev_report_dp_json_async(NULL,dp_msg,sizeof(dp_msg)/sizeof(TY_OBJ_DP_S));
if (op_ret != OPRT_OK){
PR_ERR("dev_report_dp_json_async op_ret:%d\n", op_ret);
return op_ret;
}
PR_NOTICE("dev_report_dp_json_async success");